Как нарисовать робота карандашом (58 фото)
Разнообразные роботизированные герои часто встречаются в мультфильмах и пользуются у детей определенной популярностью. Кроме того, мультипликационные персонажи растиражированы в виде героев комиксов и детских игрушек. На повышенном интересе к подобным героям можно сыграть, если в ответ на просьбу ребенка купить ему очередного робота предложить заняться творчеством.
Заинтересовав ребенка, можно сделать для начала простой рисунок примитивного роботизированного устройства. Пошаговый урок поможет справиться и с более сложными героями.
Содержание
- Добрый робот
- Веселый робот
- Робот Валл-И
- Беймакс в броне
- Блектоп
- Фото примеры и идеи для рисования роботов
Добрый робот
Такой персонаж не оставит ребенка равнодушным и поможет научить его азам рисования.
Для занятия надо приготовить:
- альбом,
- цветные карандаши или фломастеры.


Порядок работы.
- В верхней части будущего рисунка необходимо провести два вертикальных отрезка на небольшом расстоянии друг от друга, затем соединить их параллелями. Это голова.
- Ниже этого элемента надо начертить туловище в виде квадрата, его с головой соединяют парой небольших вертикалей.
- Внутри большого квадрата надо вычертить квадрат меньшего размера.
- Над головой рисуют пару небольших отрезков под углом и соединяют их фигурой в виде эллипса.
- Проработать «лицо» персонажа, обозначить уши.
- Руки-манипуляторы присоединяют к туловищу небольшими дугами, захваты на конечностях можно оформить в виде стилизованных подков.
- Корпус и остальные детали конструкции можно детализировать, добавив винтики, прорисовав места соединений.
- Выполнить ноги-опоры в деталях.
- Цветными карандашами или фломастерами раскрасить героя. Это можно сделать в произвольной форме.
Простой рисунок поможет ребенку сделать первый шаг в освоении искусства художественного изображения.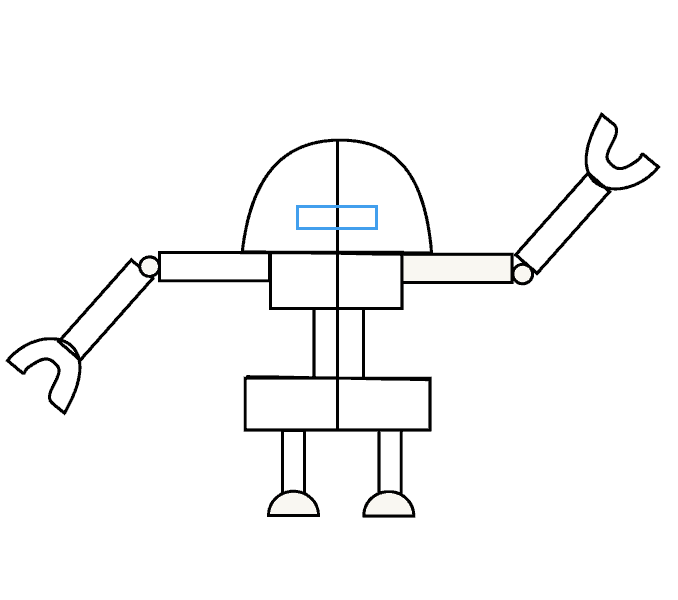
Веселый робот
Более сложным в исполнении будет следующий робот, для изображения которого применяются иные принципы.
Для работы надо запастись:
- альбомом,
- карандашами или фломастерами.
Порядок работы.
- Найти центр листа, в верхней части обозначить окружность среднего размера. Чуть ниже продублировать элемент подобным полуовалом, соединить части. Получится цилиндр-голова. Рисунок детализировать, оформив лицо, уши, антенну на макушке. На лице показать широкую улыбку.
- Ниже начертить прямоугольный корпус-тело, придав ему с помощью дополнительных отрезков объем.
- Добавить шею, соединив части корпуса.
- Руки можно оформить в разных положениях: одну опустить вниз, другую приподнять и согнуть в «локте».
- Захваты-манипуляторы несложно изобразить в виде рукавиц.
- Детализировать элементы корпуса, нарисовав болты, клепки, панель управления.
- Нижние конечности при помощи овальных линий можно изобразить круглыми, детализировать их.
- Раскрасить робота фломастерами или карандашами.

Робот Валл-И
Поэтапное освоение техники рисования позволит приобрести хороший опыт и перейти к более сложным творческим задачам.
Для занятия понадобится:
- альбом,
- простой карандаш,
- коробка цветных карандашей.
Порядок работы.
- Разметить лист, определив середину.
- В верхней части наметить две фигуры каплевидной формы, соединив их перемычкой. Продублировать элементы, придав им объем. Это оптика-глаза робота.
- Ниже изобразить прямоугольник.
- Соединить оптику машины с прямоугольным корпусом, изобразив рейку с шарнирным соединением при помощи прямых линий.
- Прямоугольный корпус сделать объемным при помощи дополнительных прямых отрезков.
- Сбоку на корпусе изобразить руку-манипулятор. Детализировать ее и нарисовать лапу-захват.
- Начертить вторую конечность-захват.
- В нижней части корпуса нарисовать треугольники, округлив их вершины. Это траки для перемещения персонажа.
- Прорисовать элементы гусениц и ролики.
- Дополнить тело прямыми линиями для детализации изображения.
- Раскрасить детали.

Рисунок достаточно сложный, поэтому потребуется терпение и ластик. Внимание к деталям поможет справиться с задачей и научиться рисовать сложные устройства.
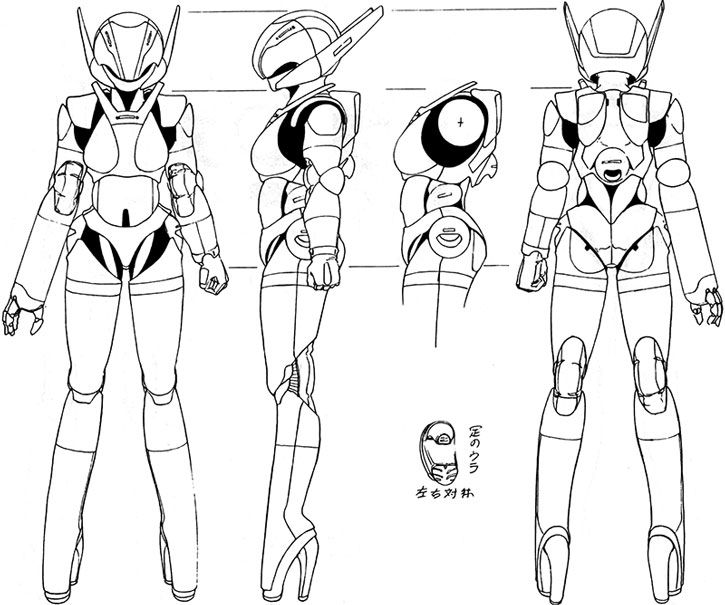
Беймакс в броне
На примере поэтапного изображения этого персонажа ребенок научится рисовать популярных роботов-трансформеров. Схема изображения предполагает демонстрацию боевой мощи, поэтому следует выделить на рисунке торс и конечности робота, а голову изобразить не очень большого размера.
Для работы необходимы:
- альбомный лист,
- простой карандаш и ластик,
- фломастеры иди цветные карандаши.
Робота, имеющего минимум мелких деталей, можно и красками раскрасить.
Порядок работы.
- Определить середину листа и в верхней части нарисовать голову. Сразу изобразить очки на лице робота.
- Прямая линия плеч немного загибается под прямым углом.
- Овальными линиями обозначить предплечья мощного боевого робота. Дорисовать и детализировать верхние конечности.
- Изобразить объемный торс.
- Нарисовать ноги персонажа, показав его силу.
- Рисунок раскрасить.
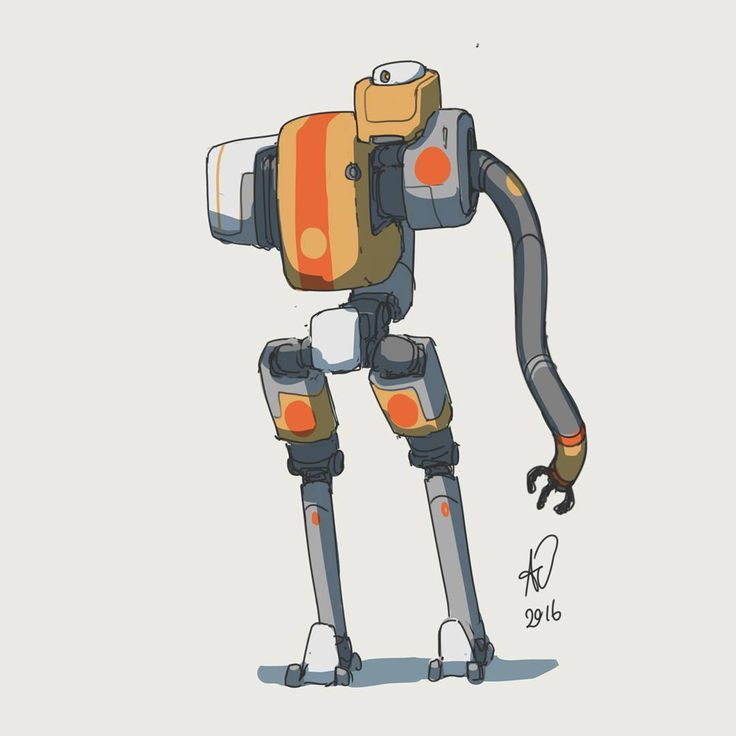
Блектоп
Потренировавшись на не очень сложных изображениях, пора взяться за воплощение в жизнь более серьезных задач.
Вооружившись все теми же инструментами для рисования, можно попробовать изобразить еще одного героя мультфильмов.
Порядок работы.
- Рисунок начинается с изображения морды-маски при помощи небольших вертикальных отрезков и уголков.
- Прорисовав маску, ее дополняют шлемом и шеей.
- С помощью угловых ломаных линий изобразить торс персонажа, снабдив его всеми необходимыми мелкими деталями.
- Особой тщательности требует изображение конечностей. Требуется детально перенести на бумагу все детали, соблюдая пропорции.
- Детали и элементы соединений изображают при помощи прямых и овальных линий.
- В нижней части тела изобразить треугольную защиту с зауженным низом. По возможности перенести на рисунок все детали и соединения на теле робота.
- Нижнюю часть каски персонажа заштриховать черным, обвести контуры робота и раскрасить его.
Научиться изображать на бумаге различных роботов несложно, если начать с простых рисунков. Постепенно можно перейти к воплощению в жизнь более сложных задач.
Рисовать роботов можно простым карандашом, ручкой, фломастерами. Рисунок можно раскрасить или оформить при помощи штриховки.
Фото примеры и идеи для рисования роботов
Автор статьи:
Как нарисовать робота самостоятельно?
Каждый из нас хотя бы раз в жизни пытался нарисовать робота. У некоторых это получалось лучше, у кого-то хуже. Но все же у многих возникал вопрос о том, как нарисовать робота наиболее реалистично. В этой статье мы расскажем как правильно сделать рисунок, чтобы он получился максимально правдоподобным.
У некоторых это получалось лучше, у кого-то хуже. Но все же у многих возникал вопрос о том, как нарисовать робота наиболее реалистично. В этой статье мы расскажем как правильно сделать рисунок, чтобы он получился максимально правдоподобным.
Первые шаги
Прежде чем приступить к самому процессу рисования, необходимо к нему подготовиться. Для этого ознакомьтесь с объектом и с его расположением. После этого проведите небольшую разминку, а именно – попытайтесь отдельно рисовать некоторые детали и элементарные фрагменты. Проделав данную работу, можете приступать к основному рисунку. Так давайте же более детально поговорим о том, как нарисовать робота.
Пошаговая работа
Первое, что необходимо сделать – так это создать эскиз. Для этого нужно начертить основные контуры будущего робота. Такие линии не нужно делать «толстыми». Для их исполнения лучше всего подбирать карандаш с мягким стержнем, чтобы линии получились почти невидимыми. Далее переходим к большим деталям, а именно – к наибольшим составляющим робота. Почему именно к наибольшим? Это поможет вам «набить руку» и немного освоиться в образе художника, особенно если вы новичок. Для более удобного рисования начинать нужно с туловища, постепенно дорисовывая остальные части. Так вы не только не собьётесь, но и быстрее завершите работу. Когда все большие части нарисованы – переходим к мелким деталям. Здесь нужно быть очень внимательным, так как их может быть очень много, да и расположение порой не совсем удобное для рисования. Поэтому, если вы только учитесь искусству рисования, то наш вам совет – для начала выбирайте что-то не слишком детализированное, со временем переходя к более сложным вещам. И вот, когда уже все сделано согласно правилам о том, как нарисовать робота, можно добавить заключительные штрихи. Для этого наведите контур острым карандашом или ручкой, делая его более отчетливым. По возможности можно создать эффект тени или зарисовки, но только в том случае, если вы уже умеете это делать, ведь что-то лишнее может испортить всю работу.
Почему именно к наибольшим? Это поможет вам «набить руку» и немного освоиться в образе художника, особенно если вы новичок. Для более удобного рисования начинать нужно с туловища, постепенно дорисовывая остальные части. Так вы не только не собьётесь, но и быстрее завершите работу. Когда все большие части нарисованы – переходим к мелким деталям. Здесь нужно быть очень внимательным, так как их может быть очень много, да и расположение порой не совсем удобное для рисования. Поэтому, если вы только учитесь искусству рисования, то наш вам совет – для начала выбирайте что-то не слишком детализированное, со временем переходя к более сложным вещам. И вот, когда уже все сделано согласно правилам о том, как нарисовать робота, можно добавить заключительные штрихи. Для этого наведите контур острым карандашом или ручкой, делая его более отчетливым. По возможности можно создать эффект тени или зарисовки, но только в том случае, если вы уже умеете это делать, ведь что-то лишнее может испортить всю работу.
Рисование особых роботов
Немного затруднительным может быть рисование особых роботов, то есть трансформера или Валли, например. Хотя, если разобрать в ходе работы, то ничего особо сложного здесь нет. Давайте мы разберемся, в чем же состоит суть проблемы. Начнем со сложного. Прежде чем впадать в панику, задаваясь вопросом о том, как нарисовать робота трансформера, необходимо запомнить, что нет ничего невозможного и имея лишь желание и терпение можно добиться всего. Особенностью данного вида является множество маленьких деталей, расположенных по всему корпусу. Именно на это и следует обращать главное внимание. Пошаговая работа исполняется в вышеперечисленном порядке с учетом большего количества маленьких деталей. Рисование трансформера значительно отличается от того, как нарисовать робота Валли, поскольку он имеет значительно меньшие размеры и не так много сложных деталей.
Подведем итоги
Прочитав данную статью, вы уже знаете о том, как нарисовать робота. Если ответственно подойти к данному вопросу, то все не так сложно, как может казаться на первый взгляд. Давайте еще раз повторим, какие шаги нужно предпринять во время всей работы: сначала вам необходимо выбрать объект, сделать его эскиз, начертив начальные линии, после этого добавить оставшиеся детали, а затем навести контур и главные линии. Вот видите – здесь нет ничего чрезвычайно сложного. Если вы серьезно возьметесь за работу, то уже за час-полтора будете иметь готовый результат. Главное — верить в себя и не опускать руки в случае неудачи. У вас все получится!
Давайте еще раз повторим, какие шаги нужно предпринять во время всей работы: сначала вам необходимо выбрать объект, сделать его эскиз, начертив начальные линии, после этого добавить оставшиеся детали, а затем навести контур и главные линии. Вот видите – здесь нет ничего чрезвычайно сложного. Если вы серьезно возьметесь за работу, то уже за час-полтора будете иметь готовый результат. Главное — верить в себя и не опускать руки в случае неудачи. У вас все получится!
R7-2017-01: множественные уязвимости в роботе телеприсутствия Double Robotics
Последнее обновление в пятницу, 10 мая 2019 г., 17:06:49 по Гринвичу
В этом сообщении описываются три уязвимости в экосистеме роботов телеприсутствия Double Robotics, связанные с неправильной аутентификацией , фиксация сеанса и слабое сопряжение Bluetooth. Мы хотели бы поблагодарить Double Robotics за их быстрое обнаружение уязвимостей и за устранение тех, которые они считали серьезными. Две из трех уязвимостей были исправлены с помощью обновлений серверов Double Robotics в понедельник, 16 января 2017 г.
Кредит
Эти проблемы были обнаружены исследователем Rapid7 Дералом Хейландом. О них сообщили Double Robotics и CERT/CC в соответствии с политикой раскрытия информации Rapid7.
Измененный продукт
Робот Double Telepresence — это мобильное устройство для проведения конференций. Его мобильность позволяет удаленному пользователю перемещаться по офису для встреч и личных бесед.
Заявление поставщика
От соучредителя и генерального директора Double Robotics Дэвида Канна:
В Double Robotics мы стремимся предоставить нашим клиентам наилучшие возможности, что означает не только предоставление гибких инновационных технологий, но и высочайший уровень безопасности. Тщательные тесты Rapid7 на проникновение обеспечивают максимально безопасную работу всех наших продуктов, поэтому мы можем продолжать предоставлять наилучшие возможности телеприсутствия. До внедрения исправлений ни один вызов не был скомпрометирован, а конфиденциальные данные клиентов не были раскрыты.
 Кроме того, Double использует сквозное шифрование с WebRTC для безопасных видеозвонков с малой задержкой.
Кроме того, Double использует сквозное шифрование с WebRTC для безопасных видеозвонков с малой задержкой.Сводка уязвимостей
- R7-2017-01.1: доступ к данным без проверки подлинности установка\_keys и координаты GPS.
- Маркер доступа (также называемый драйвером \_token), созданный во время назначения учетной записи роботу, никогда не менялся и срок его действия не истек. Если этот токен был скомпрометирован, его можно было использовать для управления роботом без учетной записи пользователя или пароля.
- Процесс сопряжения между мобильным приложением (iPad) и приводом робота не требует от пользователя знания PIN-кода запроса. После сопряжения с приводом робота злоумышленник может загрузить мобильное приложение Double Robot из Интернета и использовать его (вместе с веб-сервисами) для управления приводом.

Сведения об уязвимостях и меры по их устранению
R7-2017-01.1: доступ к данным без проверки подлинности В следующем примере доступ к важной информации, связанной с сеансом, осуществлялся с использованием URL-адреса https://api.doublerobotics.com/api/v1/session/?limit =1&смещение=xxxxxxx&format=json . Увеличивая число «offset=», можно перечислить информацию обо всех прошлых и текущих сеансах:
В следующем примере ключи установки робота и пользователя были пронумерованы путем увеличения числа «offset=» в URL-адресе https://api.doublerobotics.com/api/v1/installation/?limit=1&offset=xxxxxxx&format=json , как показано ниже:
В понедельник, 16 января 2017 г., компания Double развернула серверное исправление, чтобы смягчить эту проблему. проблема.
R7-2017-01.2: Статическое управление сеансом пользователя получить доступ к iPad Double Robot или успешно создать SSL-атаку «человек посередине» против устройства. Например, в результате успешной атаки «человек посередине» или доступа к файлу cache.db робота iPad злоумышленник может идентифицировать robot\_key, как показано ниже: Используя этот robot\_key, пользователь, не прошедший проверку подлинности, может перечислить все токены доступа пользователя (driver_tokens), которые разрешают удаленный доступ к управлению роботом. Пример этого метода перечисления показан ниже:
В понедельник, 16 января 2017 г., компания Double Robotics развернула серверное исправление для устранения этой проблемы. Запросы API, описанные выше, больше не предоставляют связанные токены сеанса устройству Double.
R7-2017-01.3: Слабое сопряжение Bluetooth
 Например, в результате успешной атаки «человек посередине» или доступа к файлу cache.db робота iPad злоумышленник может идентифицировать robot\_key, как показано ниже:
Например, в результате успешной атаки «человек посередине» или доступа к файлу cache.db робота iPad злоумышленник может идентифицировать robot\_key, как показано ниже: Подверженность этой уязвимости ограничена, поскольку одновременно устройство может быть сопряжено только с одним управляющим приложением. Кроме того, злоумышленник должен находиться достаточно близко, чтобы установить Bluetooth-соединение. Это расстояние может быть значительным (до 1 мили) при добавлении антенны с высоким коэффициентом усиления.
В понедельник, 16 января 2017 г., компания Double Robotics сообщила, что не считает это серьезной уязвимостью системы безопасности и в настоящее время не планирует ее исправлять. Пользователи должны убедиться, что сборка драйвера остается сопряженной с управляющим iPad, чтобы избежать воздействия.
Хронология раскрытия информации
Это сообщение об уязвимости было подготовлено в соответствии с политикой раскрытия информации Rapid7.
- Декабрь 2016: Обнаружен Дерал Хейланд из Rapid7
- Пн, 09 января 2017 г.: Раскрыто Double Robotics 2017-01.1 и R7-2017-01.2 были исправлены Double Robotics с помощью серверных исправлений
- Вт, 24 января 2017 г .: раскрыто CERT/CC
- Среда, 25 января 2017 г.: Rapid7 и CERT/CC решили не выпускать CVE для этих уязвимостей. R7-2017-01.01 и 01.02 присутствовали на сервере веб-приложений Double. Поскольку был только один экземпляр уязвимого программного обеспечения и для применения исправлений не требовалось никаких действий пользователя, CVE не гарантируется. R7-2017-01.03 представляет собой опасность, о которой должны знать пользователи, но она позволяет управлять приводом только в случае успешного сопряжения. Пользовательские данные не могут быть изменены без дополнительной компрометации.
- Вс, 12 марта 2017 г.: опубликовано
 R7-2017-01.03 представляет собой опасность, о которой должны знать пользователи, но она позволяет управлять приводом только в случае успешного сопряжения. Пользовательские данные не могут быть изменены без дополнительной компрометации.
R7-2017-01.03 представляет собой опасность, о которой должны знать пользователи, но она позволяет управлять приводом только в случае успешного сопряжения. Пользовательские данные не могут быть изменены без дополнительной компрометации.Как рассчитать переднюю кинематику робота за 5 простых шагов
Расчет прямой кинематики часто является первым шагом к использованию нового робота. Но как начать?
Несмотря на то, что в Интернете доступно несколько хороших руководств, до сих пор не было простого пошагового руководства для расчета прямой кинематики.
Вот простое руководство по расчету кинематики любого робота-манипулятора.
[С тех пор как я впервые опубликовал эту статью в 2015 году, она стала одной из наших самых популярных статей! С тех пор я обновил и улучшил его, но основная простота осталась прежней..]
Вычисление кинематики является краеугольным камнем навыка для инженеров-робототехников. Но кинематика иногда может быть проблемой (например, понимание разницы между прямой и обратной кинематикой).
Но кинематика иногда может быть проблемой (например, понимание разницы между прямой и обратной кинематикой).
Когда я впервые начал заниматься исследованиями в области робототехники, мне часто говорили: «иди и посчитай переднюю кинематику этого робота». По сути, эта фраза является сокращением для исследования робототехники для «иди и познакомься с этим роботом».
Расчет прямой кинематики является жизненно важным первым шагом при использовании любого нового робота в исследованиях, особенно для манипуляторов.
Несмотря на то, что я изучал теорию кинематики в университете, только когда я рассчитал различные кинематические решения для нескольких реальных роботов, весь процесс стал интуитивно понятным. Даже тогда, поскольку я не рассчитывал кинематику каждый день, мне приходилось возвращаться к своим заметкам, чтобы напоминать себе, как это сделать, каждый раз, когда я сталкивался с новым роботом.
Было бы очень полезно иметь пошаговое руководство по этапам прохождения. Таким образом, мне не пришлось бы читать сотни страниц академически написанных уравнений в учебниках.
Таким образом, мне не пришлось бы читать сотни страниц академически написанных уравнений в учебниках.
Было бы полезно что-то вроде «шпаргалки» по кинематике.
Этот пост как раз и есть шпаргалка.
В первую очередь я сосредоточусь на подходе Деванита-Хартенберга (DH) к прямой кинематике, поскольку он является наиболее распространенным.
Надеюсь, вам понравится!
Шаг 1: Возьмите карандаш и бумагу
При запуске нового робота может возникнуть соблазн сразу же перейти к компьютеру. Однако, даже если робот выглядит как «стандартный» манипулятор 6R (наиболее распространенный тип робота), я всегда сажусь с карандашом и бумагой, чтобы нарисовать кинематическую схему.
Эта простая задача заставляет вас тщательно рассмотреть реальную физическую конфигурацию робота, избегая ложных предположений, которые могут нанести ущерб позже во время кодирования.
Существуют различные способы рисования кинематической цепи. Выберите любой стиль, который вы предпочитаете.
Я предпочитаю простые цилиндры для поворотных соединений и линии для звеньев, как показано на рисунке. Выполните поиск картинок в Google по запросу «кинематическая диаграмма» и просмотрите несколько доступных стилей.
Во время рисования определите, в каком направлении движется каждый сустав, и нарисуйте это движение в виде двусторонних стрелок на диаграмме.
Шаг 2: Нарисуйте оси
Следующим важным шагом является нанесение осей на каждый сустав. Подход DH назначает разные оси каждому подвижному суставу.
Если правильно настроить оси, работать с роботом будет легко. Настройте их неправильно, и вы будете страдать бесчисленными головными болями. Эти оси потребуются симуляторам, решателям обратной кинематики и вашим коллегам в вашей команде (никто не хочет решать решение прямой кинематики, если это уже сделал кто-то другой).
Посмотрите это видео, чтобы узнать, как их настроить:
Две важные оси для работы:
- Ось Z — Ось Z должна лежать на оси вращения вращательного шарнира или оси растяжения призматического шарнира.
- Ось X — Ось X должна лежать вдоль «общей нормали», которая является кратчайшей ортогональной линией между предыдущей осью Z и текущей осью Z (серьезно, посмотрите видео).
- Ось Y — После того, как вы рассчитали две другие, эта ось должна встать на место, следуя «правилу правой руки» (см. ниже).

Лично я рисую оси, используя следующую раскраску: ось z (синяя) , ось x (красная) и ось y (зеленая) . Кстати, это цветовая схема, которая используется в визуализаторе RViz от ROS, которую я широко использовал во время работы над диссертацией.
Еще когда я был студентом, наш лектор предложил нам сделать ось «скульптуру» из трех цветных соломинок, воткнутых в сферу синей гвозди, чтобы объяснить нам теорию. Хотя это может показаться немного «игровой школой», это может быть очень полезно, поскольку вы можете расположить скульптуру рядом с физическим роботом, чтобы убедиться, что оси указывают в правильном направлении.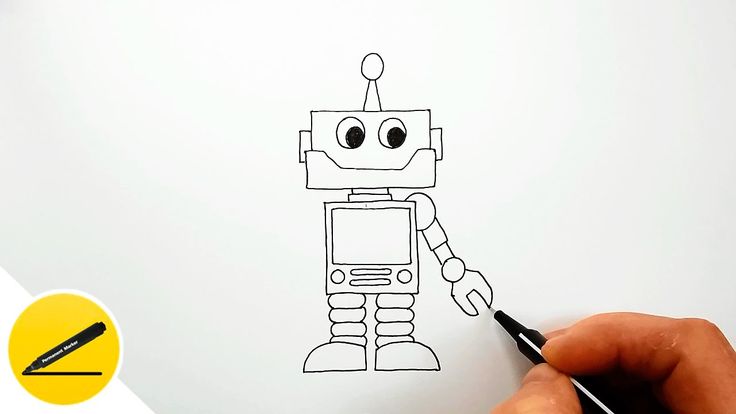 Чтобы получить виртуальную версию, воспользуйтесь этим интерактивным инструментом.
Чтобы получить виртуальную версию, воспользуйтесь этим интерактивным инструментом.
В качестве альтернативы вы можете использовать «правило правой руки».
Правило правой руки
Быстрый и простой способ запомнить направление оси Y — следовать правилу правой руки. Это мнемоника (помощь для запоминания), широко используемая в физике для запоминания ориентации трехмерной оси.
Чтобы использовать его, вытяните правую руку перед собой, вытянув большой, указательный и средний пальцы под углом 90 градусов друг к другу. Каждый палец соответствует оси:
- Большой палец = ось Z.
- Указательный палец = ось X.
- Средний палец = ось Y.
При направлении большого и указательного пальцев вдоль осей z и x шарнира робота, ваш средний палец естественным образом упадет в направлении оси y.
Шаг 3: Запомните свой концевой эффектор
Цель расчета прямой кинематики состоит в том, чтобы иметь возможность рассчитать положение конечного эффектора по положению суставов.
В большинстве учебных пособий по прямой кинематике конечный эффектор рассматривается как одно расстояние от конечного сустава. Это нормально для простого захвата «открыть-закрыть». Однако, поскольку современные захваты часто более сложны, стоит рассмотреть, как работает концевой эффектор.
Например, 3-пальцевый адаптивный захват Robotiq имеет несколько различных режимов захвата. Каждый режим будет соответствовать немного отличающемуся желаемому положению конечного эффектора. Если вы хотите зажать объект между его пальцами, для этого потребуется другое расстояние, чем если бы вы хотели обхватить объект пальцами.
При построении кинематической модели всегда следует тщательно учитывать концевой зажим.
Шаг 4: Расчет параметров DH
Параметры Денавита-Хартенберга (DH) часто требуются для ввода модели робота в симулятор и начала выполнения любого вида анализа.
Лучший способ визуализировать параметры DH — посмотреть видео, которое я уже включил выше.
Параметры DH разбивают каждое соединение робота на четыре параметра, каждый из которых берется относительно предыдущего соединения. Они рассчитываются относительно «общей нормы», описанной выше. Обратите внимание, что если предыдущая ось z пересекает текущую ось z, что часто бывает, общая нормаль имеет нулевую длину.
- d — расстояние между предыдущей осью x и текущей осью x, по предыдущей оси z.
- θ — угол вокруг оси z между предыдущей осью x и текущей осью x.
- a (или r) — длина общей нормали, которая представляет собой расстояние между предыдущей осью z и текущей осью z
- α — угол вокруг общей нормали между предыдущей осью z и текущей осью z.
Просмотрите все соединения на чертеже и запишите параметры DH для каждого соединения. Каждое соединение должно иметь одно значение, которое является переменной, представляющей приводимое в действие соединение.
Для получения более подробного объяснения и некоторых примеров я рекомендую этот раздаточный материал Питера Корка или эту главу из Введение в робототехнику.
Альтернативы параметрам DH
Подход DH является наиболее распространенным подходом к прямой кинематике, но он не идеален. Одним из его недостатков является то, что он не очень элегантно обрабатывает параллельные оси Z. Существуют различные альтернативы, в том числе представления теории винтов, Hayati-Roberts и другие геометрические модели (см. эту статью для сравнения). Это могут (или не могут) быть лучшие подходы. Однако большинство кинематических библиотек принимают параметры DH, и по этой причине это разумный подход для начала.
Шаг 5. Объединение параметров в робота целиком
Последний шаг — объединение всех параметров DH в робота целиком. Есть два способа сделать это, сложный и простой:
Трудный путь: Создайте свой собственный решатель
«Чистый» метод использования параметров DH состоит в том, чтобы «свернуть свой собственный» решатель Forward Kinematic, используя ваш любимый язык программирования. Я сам использовал этот подход в прошлом, хотя, вероятно, в наши дни я бы не стал этого делать.
Я сам использовал этот подход в прошлом, хотя, вероятно, в наши дни я бы не стал этого делать.
Когда у вас есть параметры DH для каждого соединения, вы можете использовать этот метод для кодирования их в решателе прямой кинематики:
- Найдите библиотеку на вашем языке программирования, которая позволяет выполнять матричное умножение. Кроме того, напишите свой собственный код, используя методы из этого списка.
- Для каждого соединения робота заполните новую матрицу 4 x 4 следующими значениями:
- Перемножьте все матрицы вместе, начиная с первого сустава и заканчивая концевым эффектором.
- Окончательный вектор T будет содержать положение концевого эффектора. Матрица R будет содержать ориентацию концевого эффектора.
Если вы просто хотите попробовать это с некоторыми значениями, не кодируя свой собственный решатель, вы можете использовать этот удобный онлайн-инструмент, чтобы создать рабочий пример полного робота из его параметров DH.
По моему опыту, создание собственного решателя не дает больше преимуществ, чем использование существующей библиотеки. Тем не менее, это хорошее упражнение для обучения.
Простой способ: используйте существующие библиотеки
Гораздо более эффективный способ расчета прямой кинематики, если у вас есть параметры DH, — использовать существующую библиотеку.
Существует множество кинематических программных библиотек, и многие из них делают гораздо больше, чем просто рассчитывают прямую кинематику. Большинство из них включают в себя решатели обратной кинематики, динамику, визуализацию, планирование движения и обнаружение столкновений, и это лишь некоторые из функций. Эти библиотеки преобразуют ваши параметры DH в матрицы, которые затем перемножаются, чтобы рассчитать взаимосвязь между положениями суставов и положением конечного эффектора.
Некоторые хорошие библиотеки для разработки включают Robotics Library, Orocos Kinematics and Dynamics Library, ROS MoveIt, OpenRave, RoboAnalyzer и Matlab Robotics Toolbox.